中华网家电
设为书签Ctrl+D将本页面保存为书签,全面了解最新资讯,方便快捷。
在广袤无垠的海洋中,水下设施的安全巡检一直是极具挑战性的领域。传统潜水员作业方式不仅面临高风险,且效率有限,难以满足现代海洋工程对巡检工作的严苛要求。如今,一款高机动性水下自主巡检机器人应运而生,以卓越性能和创新技术,为水下巡检领域带来变革,成为深海探索的 “蓝巡者”。

卓越性能:深海作业的坚实保障
这款高机动性水下自主巡检机器人具备令人瞩目的性能参数。它能轻松下潜至 50 米深度,在深海的高压环境下稳健作业,为水下设施的全面检测提供了深度保障。凭借 2 米 / 秒的航行速度,它如同敏捷的深海猎豹,能快速抵达目标区域,及时响应巡检需求。而其 8 小时的续航时间,更是大幅减少了因频繁充能导致的作业中断,确保在广袤海域长时间持续作业,一次性完成大规模巡检任务,极大提升了工作效率。
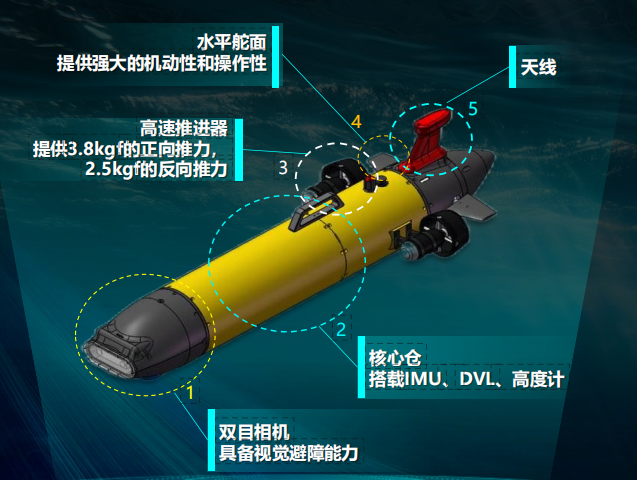
机动性能上,它展现出非凡优势,转弯半径仅 0.2 米,这一出色的灵活性让它在狭窄、复杂的水下环境中也能自由穿梭,无论是穿梭于水下管道,还是在舰船底部、海洋牧场网箱等密闭空间巡检,它都能灵活转向,轻松应对各种复杂地形,无死角完成巡检使命。

先进传感与智能算法:精准洞察的 “智慧大脑”
机器人搭载了强大的传感配置,双目相机、DVL、高度计和声纳协同工作,构建起全方位的感知系统。双目相机如同机器人的明亮双眼,即使在昏暗的水下环境中,也能捕捉到高清、立体的图像,精准呈现水下设施的外观细节、受损情况等。DVL 则精确测量机器人与海底或水下结构的相对速度,确保航行姿态的稳定和精准控制。高度计实时监测水深,为作业深度的精确规划提供数据支持,而声纳则具备强大的穿透能力,能探测到隐藏在水下浑浊区域或隐蔽部位的障碍物和结构异常,提前发出预警,保障巡检作业的安全性。
其自主导航技术采用改进的 A * 与 NODWA 混合算法,这一先进技术赋予机器人卓越的路径规划与自主决策能力。在未知复杂的水下环境中,它能迅速分析地形和障碍物分布,规划出最优的巡检路径,高效覆盖目标区域,避免重复和遗漏,如同一位经验丰富的水下向导,精准引领机器人前行。智能视觉算法中的水下双目视觉校正技术,则解决了水下光线折射、散射等复杂光学问题,确保双目相机获取的图像数据准确无误,为后续的图像分析和设施检测提供可靠依据,让机器人对水下物体的识别、定位和测量精度达到全新高度。
独特设计:性能与效率的完美融合
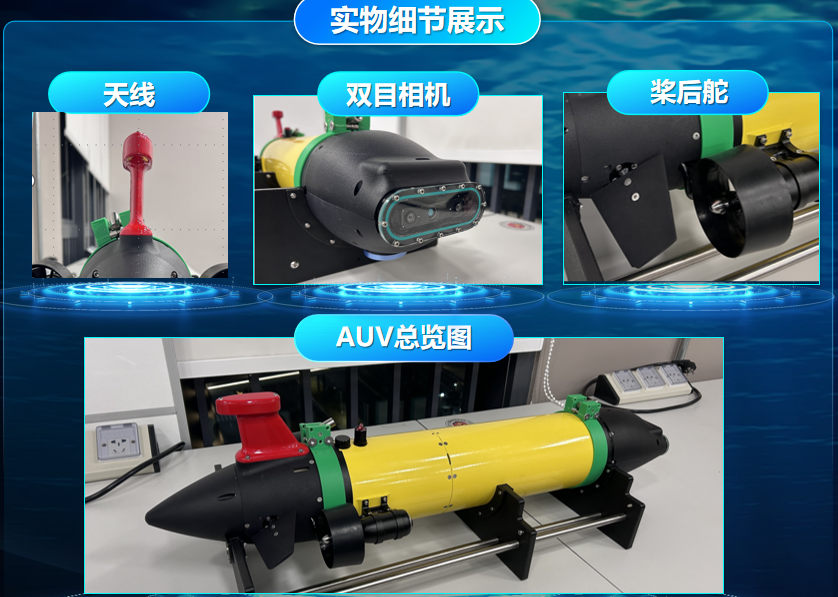
在设计与结构方面,该机器人采用长 746mm、宽 205mm、高 165mm 的紧凑尺寸和轻量化设计,便于运输、投放和回收,能快速部署到各种水域现场,无论是偏远海域还是内陆水体,都能轻松应对。独特的流线型机身设计 + 桨后舵 + 双推进器结构,更是其性能优异的关键。流线型机身大幅减少了水下航行阻力,提升航速和能效,如同潜艇般在水中灵动穿梭。桨后舵设计优化了操控性能,配合双推进器的强大,动力使机器人具备卓越的机动性和稳定性,在面对强劲水流或执行复杂任务时,始终能保持稳健航行和精准作业,展现出强大的适应性和可靠性。
突破性应用:解决行业痛点,引领效率革命
在实际应用中,这款机器人在水下石油管道巡检领域大放异彩。传统潜水员巡检石油管道,面临高压、黑暗、水流湍急以及有害物质泄漏等多重危险,且每次作业范围有限,效率低下。而该机器人凭借其卓越性能,可深入石油管道网络,持续、全面地检测管道的腐蚀、泄漏、结构变形等问题,及时发现潜在安全隐患,为石油管道的安全稳定运行保驾护航,大幅降低了人工巡检成本和风险,同时提高了巡检频率和覆盖面,将石油管道巡检工作提升至新高度。
在海上风电线缆检测方面,它同样表现非凡。海上风电场规模宏大,线缆铺设在复杂海底地形,长期受海流冲击、海洋生物附着等因素影响,容易出现损伤。传统检测手段耗时费力,而这款机器人能快速、高效地沿着线缆航行,利用先进传感器精准检测线缆的磨损、断股、绝缘层老化等问题,为海上风电的安全运维提供关键数据支持,确保清洁能源的稳定输送,助力国家新能源发展战略。
这款高机动性水下自主巡检机器人以其卓越的性能、先进的技术、独特的设计和强大的应用能力,正在重塑水下巡检行业的格局。它不仅替代了潜水员高危作业,保障了人员安全,还以高效、精准的巡检服务,推动了海洋工程、能源等领域的高质量发展,为人类探索和利用海洋资源开辟了全新篇章,未来有望在更多水下场景发挥巨大价值,持续引领水下智能装备的技术潮流。
责任编辑:kj015