中华网家电
设为书签Ctrl+D将本页面保存为书签,全面了解最新资讯,方便快捷。
在如今智能驾驶迈向全场景大规模普及的关键节点,“软硬结合”已然成为技术、产品创新绕不开的关键词。从BEV感知系统、OCC、Transformer模型、再到端到端,随着智能驾驶的进步,每一次感知、决策、执行,每个环节都与软硬件息息相关,尤其是在汽车智能化功能持续创新的当下,软件算法的复杂性随之增加,硬件也需提升自身性能,以支持软件层面的高效运行,而软件迭代带来的兼容性和稳定性等问题,也对硬件的接口、驱动程序等提出新的要求。可以说,软硬件结合是智能驾驶领域中一项极为复杂且重要的系统性工程,它需要长时间的技术积累和实践经验沉淀,才能释放最大价值。而这,也为车企及相关产业提出了新挑战。
地平线(Horizon Robotics)作为作为国内首家前装量产的高级辅助驾驶(ADAS)和高阶自动驾驶(AD)解决方案供应商,自2015年成立之初便不断探寻智能驾驶技术,其在行业变化中敏锐判断出软件结合的全栈技术是推动智能驾驶不断进化的关键和基石,并由此确立了坚定的软硬结合战略路线并持续深耕。
在智驾技术研发过程中,地平线(Horizon Robotics)专注软件和硬件的协同性,以实现最佳性能和效果。2016年,地平线(Horizon Robotics)率先提出了自动驾驶端到端的演进理念;2022 年,地平线(Horizon Robotics)提出了自动驾驶感知端到端算法Sparse4D;2023年,地平线(Horizon Robotics)研究员作为第一作者在业界首个公开发表的端到端自动驾驶大模型 UniAD,对整个行业产生了巨大影响。
值得一提的是,地平线(Horizon Robotics)在研发方向上没有选择通用计算架构路线,而是针对智能驾驶需求自主设计研发了创新性智能计算架构BPU,并赋予其“智能进化”的能力。BPU在软硬结合技术路径的引领下,经数据驱动实现自动化验证,推动智能进化,从而让机器更自主、让开发更简单、让计算更智能。
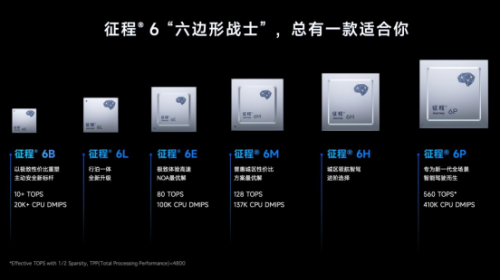
在研发路径上,地平线(Horizon Robotics)更是构建了以算法需求为导向的计算方案设计体系,形成软硬件全栈系统,最终实现量产应用。目前地平线(Horizon Robotics)新一代征程®6系列车载智能计算方案已面世,包括征程® 6B、征程 ®6L、征程 ®6E、征程 ®6M、征程® 6H、征程® 6P共计六个版本,可面向不同智能驾驶场景进行灵活配置,全方位覆盖智能驾驶全阶应用。基于搭载的BPU纳什架构,征程®6原生支持大参数Transformer、交互博弈等智能驾驶先进算法,可实现软硬结合的极致优化,灵活满足智能驾驶全场景量产差异化需求,为客户提供兼具极致性能与应用效率的专用计算方案。
得益于软硬结合的前瞻技术积累和工程化量产经验,地平线(Horizon Robotics)持续推动智驾功能的应用和创新,致力提升用户智驾体验。为突破城区NOA发展桎梏,地平线(Horizon Robotics)发布征程®6系列车载计算方案与SuperDrive™全场景智能驾驶解决方案,两者组合能打造出最佳的软硬结合高阶智驾系统。SuperDrive™凭借动态、静态、OCC (Occupancy 占用网络) 三网合一的端到端感知架构,数据驱动的交互式博弈算法,能提升系统运行效率,同时兼顾场景的通过率和通行效率。此外,SuperDrive™还为车企与产业链伙伴提供了高阶智驾样板间,通过全栈技术能力的灵活开放,帮助其提高研发与交付效率。
地平线(Horizon Robotics)以多年的产品技术和量产经验的积累,搭建了软硬结合的全栈技术能力,稳稳占据智能驾驶科技公司第一梯队。未来,地平线(Horizon Robotics)将继续坚持以用户价值为核心,与车企和生态伙伴共同推进智驾行业发展。
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。
责任编辑:kj005
文章投诉热线:157 3889 8464 投诉邮箱:7983347 16@qq.com











